External sensors¶
Veronte Autopilot 1x can be integrated with any external sensor that shares the communication interface.
External sensors can be configured to be considered as part of the sensors fusion.
High Speed Pitot Sensor¶
Once the hardware has been installed according to High Speed Pitot Sensor section of 1x Hardware Manual, the value can be monitored in 1x PDI Builder by using the variables ADC0 to ADC4.
Note
For pin ANALOG_0 the correspondent ADC variable in 1x PDI Builder is ADC0, for ANALOG_1 is ADC1 and so on.
Read the following steps to configure it:
Go to Block Programs menu
 to create a new program where the blocks configuration for reading the sensor measurements will be built.
to create a new program where the blocks configuration for reading the sensor measurements will be built.To know the basics about Block Programs, read the Block Programs section of this manual.
The configuration of this new program should be as shown in the following image:
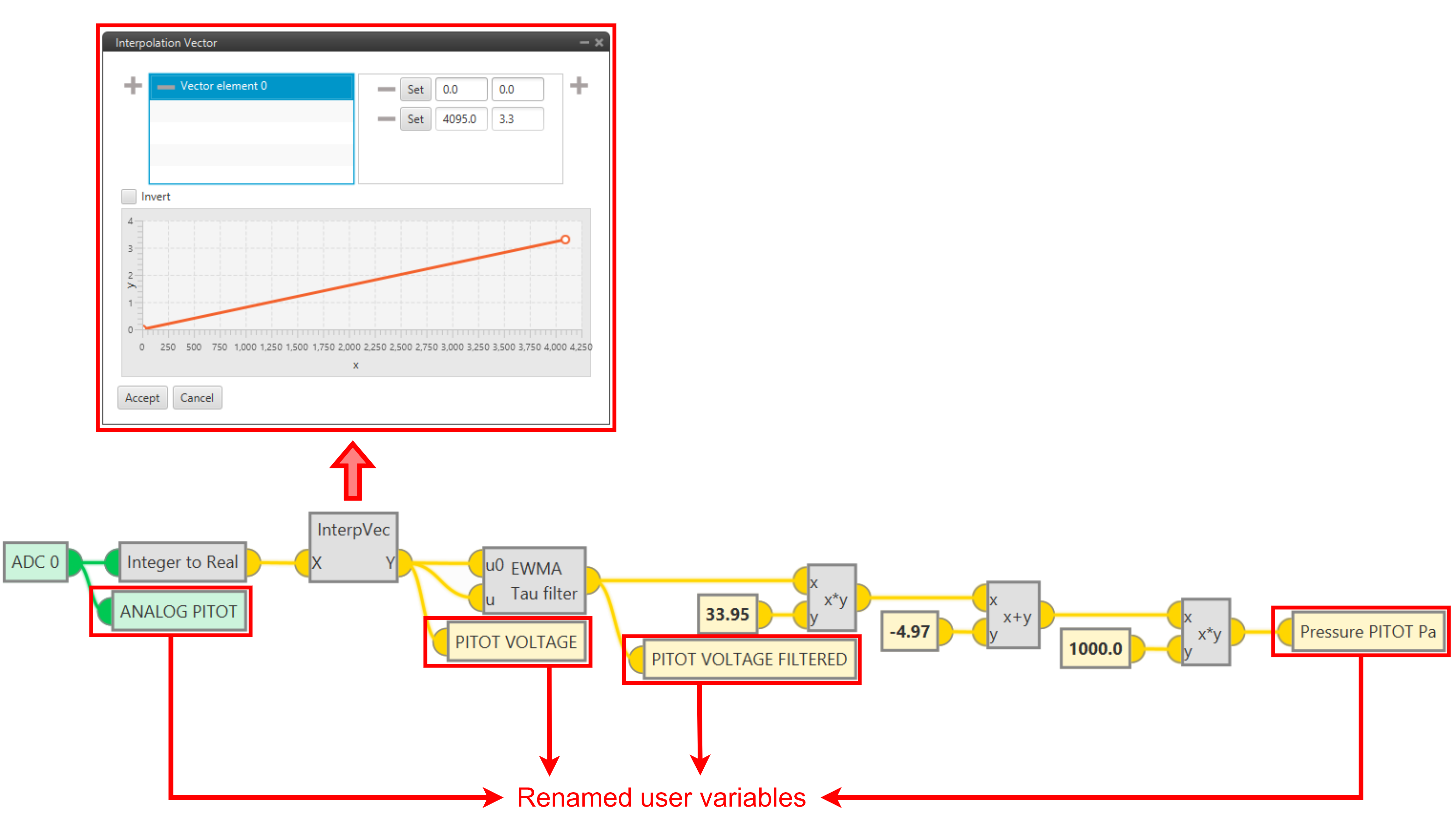
High Speed Pitot Sensor - Block program¶
Note
The EWMA filter should have a value of 0.75 for Tau.
This block program shows the configuration equivalent to the following equation: \(\Rightarrow Pressure \, PITOT (Pa) = 1000 \cdot Pressure (KPa)\) \(\Rightarrow Pressure (KPa) = 33.95 \cdot PITOT \; VOLTAGE \; FILTERED - 4.97\)
According to the previous image, pressure measurements are written in the variable Pressure PITOT Pa in pascals.
The ADC variable to select depends on the ANALOG pin used for receive data from High Speed Pitot Sensor. On the previous image, the ADC variable selected (ADC 0) reads data from pin 38.
For more information on Pinout, read the Pinout - Hardware Installation section of the 1x Hardware Manual.
Go to Sensors menu \(\rightarrow\) Dynamic Pressure panel \(\rightarrow\) Sensor tab.
Finally, enable a “Decimal var sensor” and assign it the previously calculated variable in pascals as the dynamic pressure measurement.

High Speed Pitot Sensor - Decimal var sensor configuration¶
Note
The sensor is extremely sensitive at speed 0 due to its high resolution.
LM335 with Autopilot 4x¶
Once LM335 sensor is wired and connected to Autopilot 1x or 4x (according to Temperature sensor LM335 - Integration examples section of the 4x Hardware Manual), the value can be monitored in 1x PDI Builder by using the variables ADC0 to ADC4.
Note
For pin ANALOG_0 the correspondent ADC variable in 1x PDI Builder is ADC0, for ANALOG_1 is ADC1 and so on.
Read the following steps to configure a Veronte Autopilot 1x:
Go to Connections menu \(\rightarrow\) ADC 1 panel (This is only an example, the user must select the ADC pin where the signal is connected).
Click on ‘Create new program’:
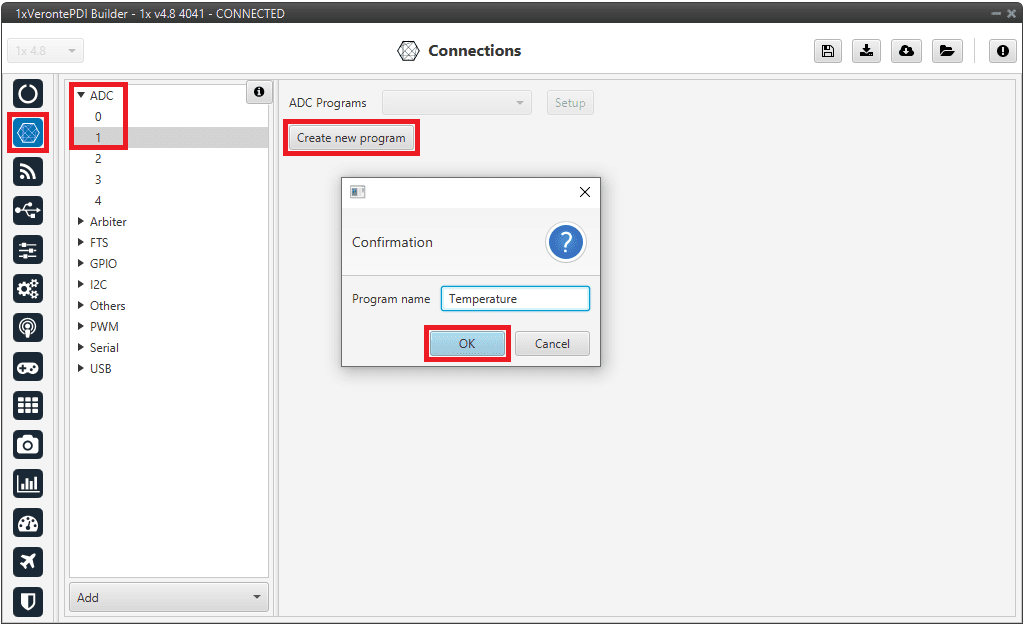
LM335 sensor - Create ADC program¶
Go to Block Programs menu \(\rightarrow\) Launch Editor.
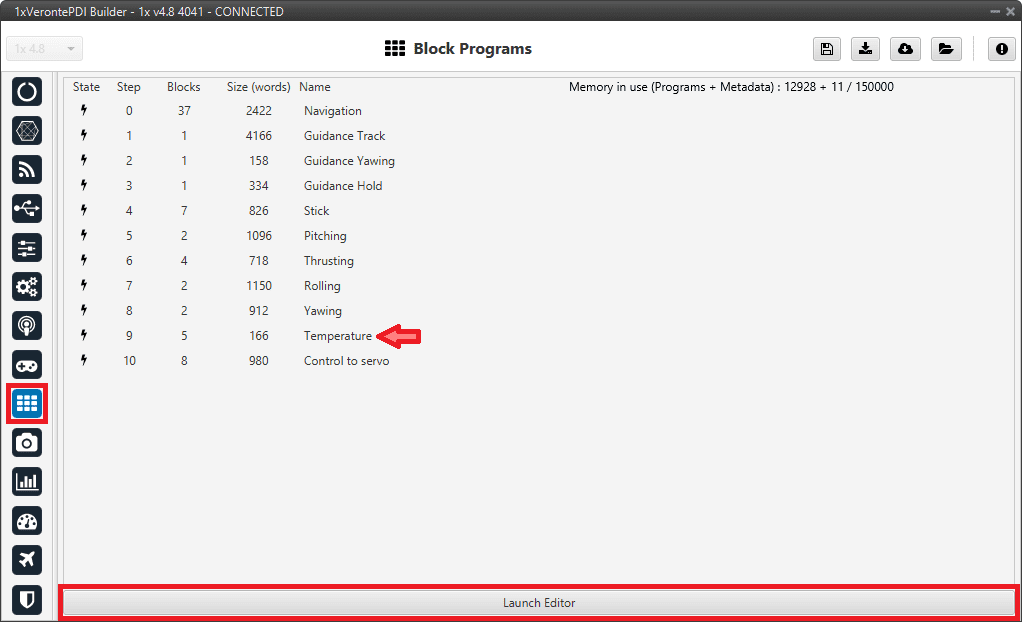
LM335 sensor - Block Programs¶
Configure the following operation (for more information about blocks, read Block Programs section of this manual):

LM335 sensor - Block Programs operation¶
Note
The Temperature variable is an User Variable which has been renamed.
The equation to obtain temperature (in ºC) from voltage is: \(T = Vout \cdot 100 - 273\). Nonetheless, in the blocks program, the input signal is not multiplied by 100, since ADC expresses the voltage in hundredths.

LM335 sensor - Block Programs operation detailed¶
The IIR Filter block requires the following configuration, where the column B has 20 coefficients (from 0 to 19) with value 1.
Click on Apply to save the changes.

LM335 sensor - IIR Filter block configuration¶
Save the configuation in the Autopilot 1x.
After implementing the operation, the variable Temperature (User variable renamed) will represent the temperature (in °C) measured by the LM335 sensor.
Tip
With Veronte Ops it is possible to check that the sensor is working correctly.
LM335 sensor - Temperature value in Veronte Ops¶
Magnetometer Honeywell HMR2300¶
RS-232¶
Magnetometer Honeywell HMR2300 can be connected via RS-232 (serial interface) in accordance with the manufacturer’s specifications and following the Pinout - Hardware Installation section of the 1x Hardware Manual.
The following steps explain how to configure Veronte Autopilot 1x to integrate this external magnetometer:
Go to Input/Output menu \(\rightarrow\) Serial panel \(\rightarrow\) RS232 tab.
Configure the serial port parameters:
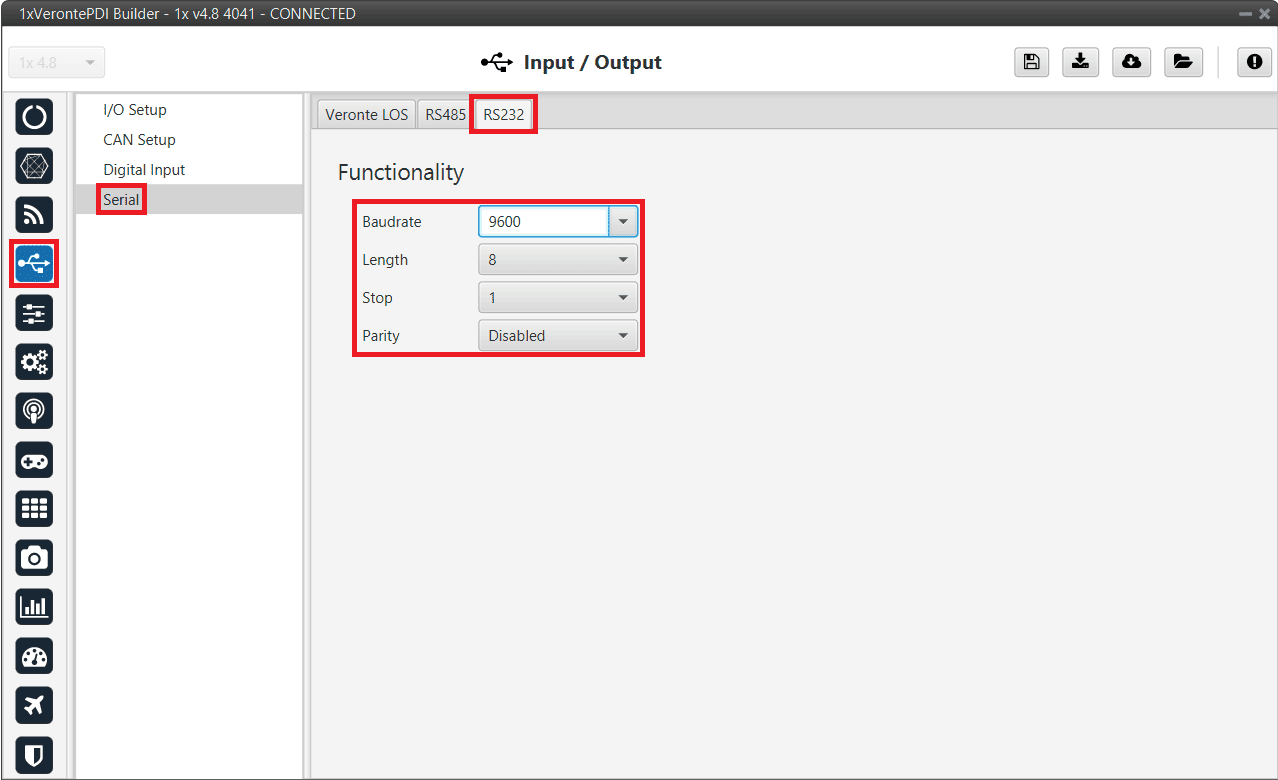
Magnetometer Honeywell HMR2300 - RS232 port configuration¶
Go to Block Programs menu.
Create a program to make the necessary connection to the sensor blocks.
Usually the user has a Navigation program where the sensor blocks are implemented.
Configure the Magnetometer sensor block selecting External HMR2300.

Magnetometer Honeywell HMR2300 - Magnetometer sensor block configuration¶
For more information on this block, see Magnetometer - Sensors blocks of Block Programs section.
Go to Input/Output menu \(\rightarrow\) I/O Setup panel.
Bidirectionally connect the RS232 Producer to the External HMR2300 magnetometer Consumer:

RS232 \(\leftrightarrow\) External HMR2300 magnetometer¶
Then, the External HMR2300 magnetometer Producer should be automatically connected to the RS232 Consumer:
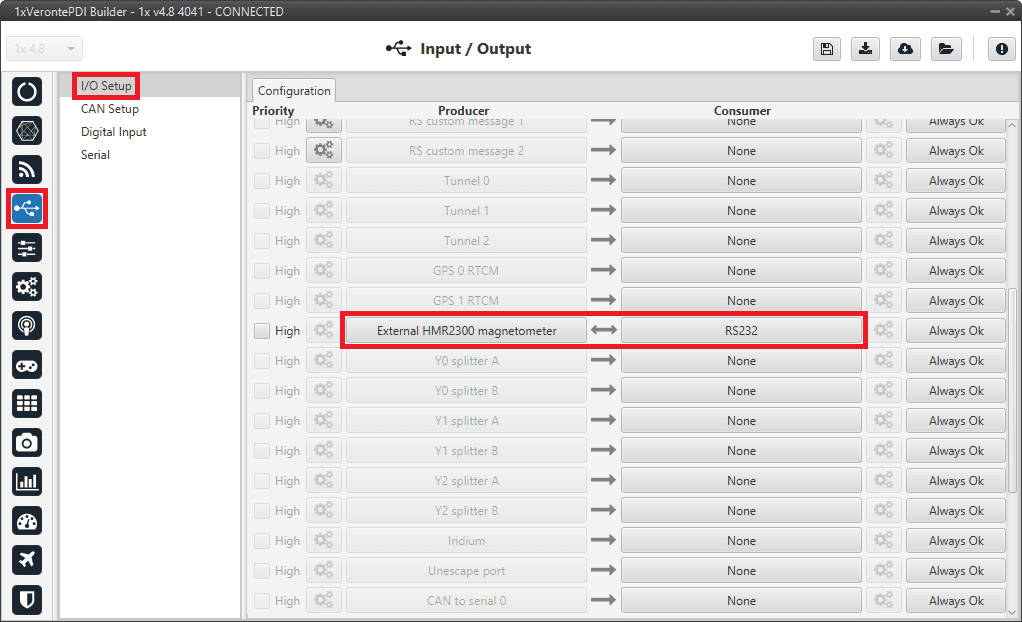
External HMR2300 magnetometer \(\leftrightarrow\) RS232¶
For more information on the Magnetometer Honeywell HMR2300, check out the datasheet: Smart Digital Magnetometer HMR2300.
RS-485¶
Magnetometer Honeywell HMR2300 can be connected via RS-485 (serial interface) in accordance with the manufacturer’s specifications and following the Pinout - Hardware Installation section of the 1x Hardware Manual.
Follow the next steps to establish a correctly communication between Honeywell HMR2300 magnetometer and Veronte Autopilot 1x via RS-485:
Connect the Honeywell HMR2300 magnetometer via USB to the PC (with a USB-RS485 conversor).
The configuration to establish communication must be:
In binary mode
With continuous fowarding
ID = 00
To configure the magnetometer in this way, the following commands must be sent to it:
*99Q: This command reads the default values, including the device ID.*00WE: This enables writing.*ddID=00: Changes the ID to 00, where dd is the device ID obtained with the first command.*00WE: Enables writing.*00B: Binary mode.*00C: Continuous send mode.*00WE: Enables writing.*00SP: Finally, this command saves the configuration in EEPROM.
Autopilot can now be configured to communicate via RS485 with the magnetometer Honeywell HMR2300.
The configuration to be carried out is very similar to that described above for communication with the magnetometer via RS-232:
Instead of configuring the 232 serial port, the 485 serial port is configured.
And, the bidirectional connection must be made between the RS485 port and External HMR2300 magnetometer and not with the RS232 port.
For more information on the Magnetometer Honeywell HMR2300, check out the datasheet: Smart Digital Magnetometer HMR2300.
MEX as Magnetometer Honeywell HMR2300¶
MEX can be used as an external magnetometer Honeywell HMR2300 connected to Veronte Autopilot 1x via serial or CAN interfaces.
Important
Both MEX and Autopilot 1x devices must be configured to conduct this integration, therefore, the following explanations are consequent to the MEX configuration detailed in the MEX as external magnetometer for Autopilot 1x - Integration examples section of MEX PDI Builder manual.
Communication via serial and CAN interfaces are explained separately.
Serial¶
For this serial connection, first check the Pinout - Hardware Installation section of the 1x Hardware Manual.
The following steps explain how to configure Veronte Autopilot 1x to integrate MEX as an external magnetometer via serial:
Go to Input/Output menu \(\rightarrow\) Serial panel \(\rightarrow\) RS232/RS485 tab.
Configure the serial port parameters:
Note
This is an example of RS-232 connection, if MEX is connected via RS-485, configure the RS485 serial tab.
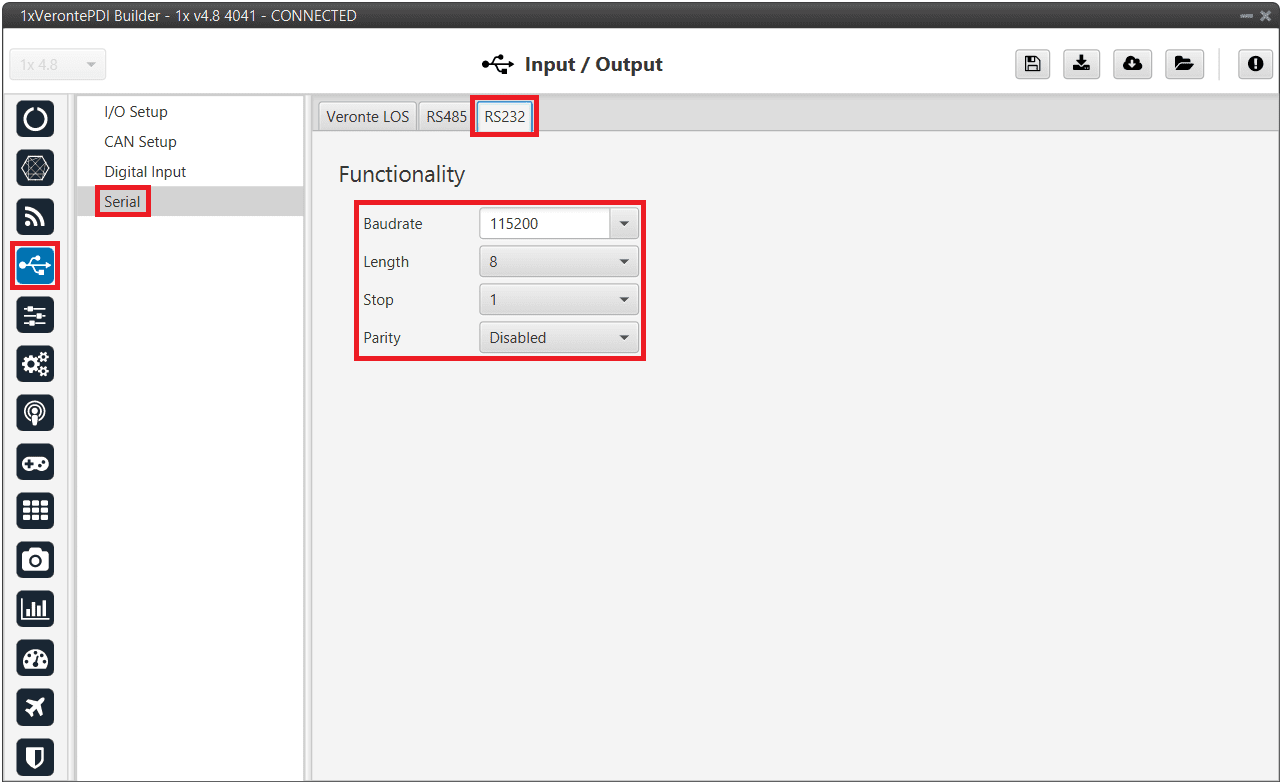
MEX as Magnetometer Honeywell HMR2300 - RS232 port configuration¶
Go to Block Programs menu.
Create a program to make the necessary connection to the sensor blocks.
Usually the user has a Navigation program where the sensor blocks are implemented.
Configure the Magnetometer sensor block selecting External HMR2300.
MEX as Magnetometer Honeywell HMR2300 - Magnetometer sensor block configuration¶
For more information on this block, see Magnetometer - Sensors blocks of Block Programs section.
Go to Input/Output menu \(\rightarrow\) I/O Setup panel.
Connect the RS232 Producer to the External HMR2300 magnetometer Consumer:
Note
If the user connects the MEX via RS-485, connect the RS485 Producer instead of RS232 Producer.
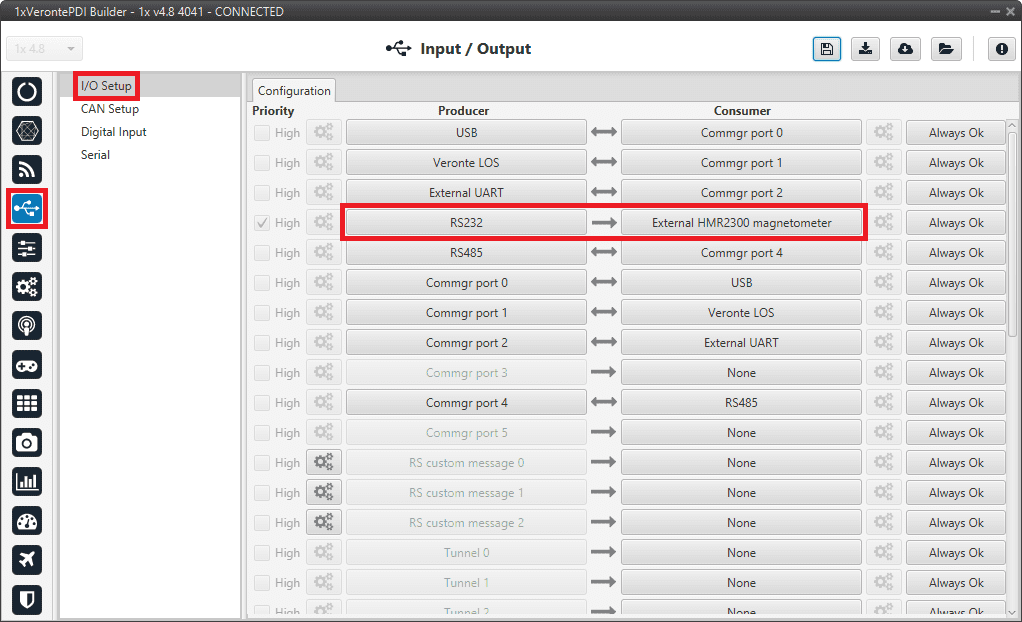
RS232 \(\rightarrow\) External HMR2300 magnetometer¶
CAN¶
The following steps explain how to configure Veronte Autopilot 1x to integrate MEX as an external magnetometer via CAN:
Go to Block Programs menu.
Create a program to make the necessary connection to the sensor blocks.
Usually the user has a Navigation program where the sensor blocks are implemented.
Configure the Magnetometer sensor block selecting External HMR2300.
MEX as Magnetometer Honeywell HMR2300 - Magnetometer sensor block configuration¶
For more information on this block, see Magnetometer - Sensors blocks of Block Programs section.
Go to Input/Output menu \(\rightarrow\) CAN Setup panel \(\rightarrow\) Mailboxes tab.
Configure the required mailboxes to receive a message with the CAN ID that matches the corresponding MEX configuration.
Note
In this example, 4 mailboxes are added for CAN A with ID 1301, according to the MEX configuration carried out in CAN - MEX as external magnetometer for Autopilot 1x in the Integration examples section of MEX PDI Builder manual.

MEX as Magnetometer Honeywell HMR2300 - CAN Mailboxes configuration¶
Go to Input/Output menu \(\rightarrow\) CAN Setup panel \(\rightarrow\) Configuration tab.
Connect an Input filter Producer to a CAN to serial Consumer.

MEX as Magnetometer Honeywell HMR2300 - CAN Setup configuration¶
Click on
 of the selected Input filter and configure it with the CAN port and CAN ID that matches those of the corresponding MEX configuration.
of the selected Input filter and configure it with the CAN port and CAN ID that matches those of the corresponding MEX configuration.Note
This example is configured according to the MEX configuration carried out in CAN - MEX as external magnetometer for Autopilot 1x in the Integration examples section of MEX PDI Builder manual.

MEX as Magnetometer Honeywell HMR2300 - Input filter configuration¶
Go to Input/Output menu \(\rightarrow\) I/O Setup panel \(\rightarrow\) Configuration tab.
Connect a CAN to serial Producer to the External HMR2300 magnetometer Consumer.
Important
The index of the CAN to serial Producer must match the index of the CAN to serial Consumer configured in the previous step.

MEX as Magnetometer Honeywell HMR2300 - I/O Setup configuration¶
OAT Sensor¶
Once OAT sensor is connected to Autopilot 1x, the value can be monitored in 1x PDI Builder by using the variables ADC0 to ADC4.
Note
For pin ANALOG_0 the correspondent ADC variable in 1x PDI Builder is ADC0, for ANALOG_1 is ADC1 and so on.
Read the following steps to configure it:
Go to Connections menu \(\rightarrow\) ADC 0 panel (This is only an example, the user must select the ADC pin where the signal is connected).
Click on ‘Create new program’:
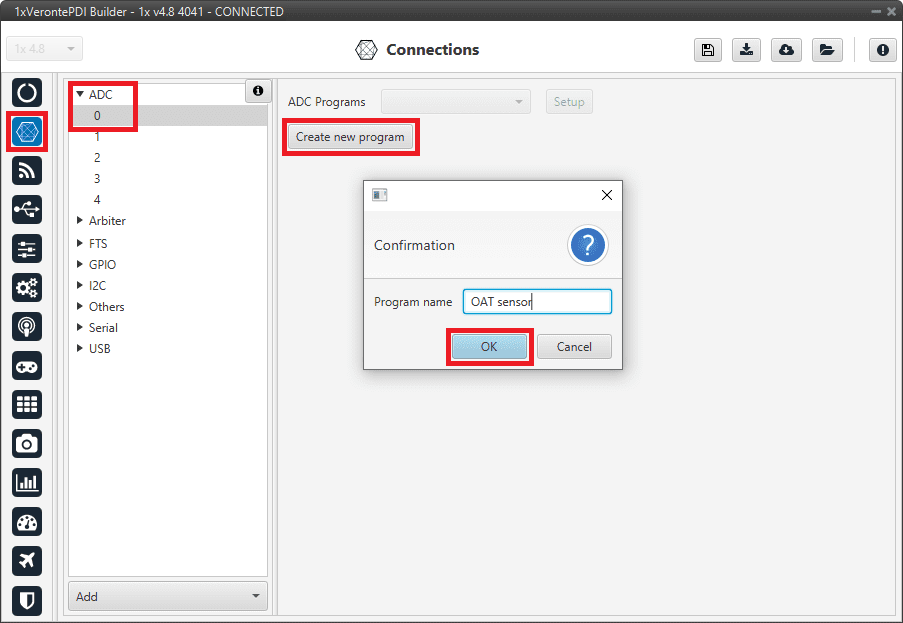
OAT Sensor - Create ADC program¶
Go to Block programs menu.
Configure the following operation (for more information about blocks, read Block Programs section of this manual):
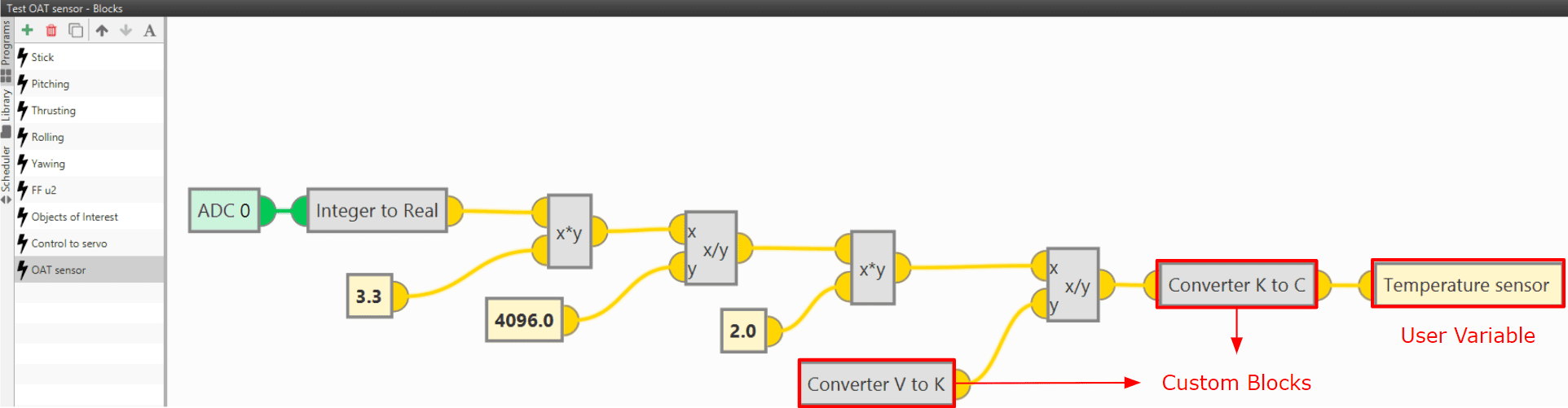
OAT sensor - Block Programs operation¶
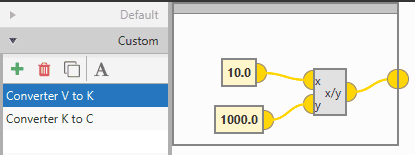
OAT sensor - Custom block: Converter from V to K¶

OAT sensor - Custom block: Converter from K to °C¶
After implementing the operation, the variable Temperature sensor will represent the temperature (in °C) measured by the OAT sensor.
Note
If the temperature is needed in other units, the only thing necessary would be to modify the Custom block Converter K to C, or simply remove it.
Note
As Autopilot 4x can read up to 36 V per each ADC, the \(3.3\) value of the ADC program must be changed to \(36\) if applicable.
Vectornav VN-300¶
Vectornav VN-300 is an external IMU that can be connected via RS-232 (serial interface) to Veronte Autopilot 1x.
The following steps explain how to configure Veronte Autopilot 1x to integrate this external IMU:
Go to Input/Output menu \(\rightarrow\) Serial panel \(\rightarrow\) RS232 tab.
Configure the serial port parameters:
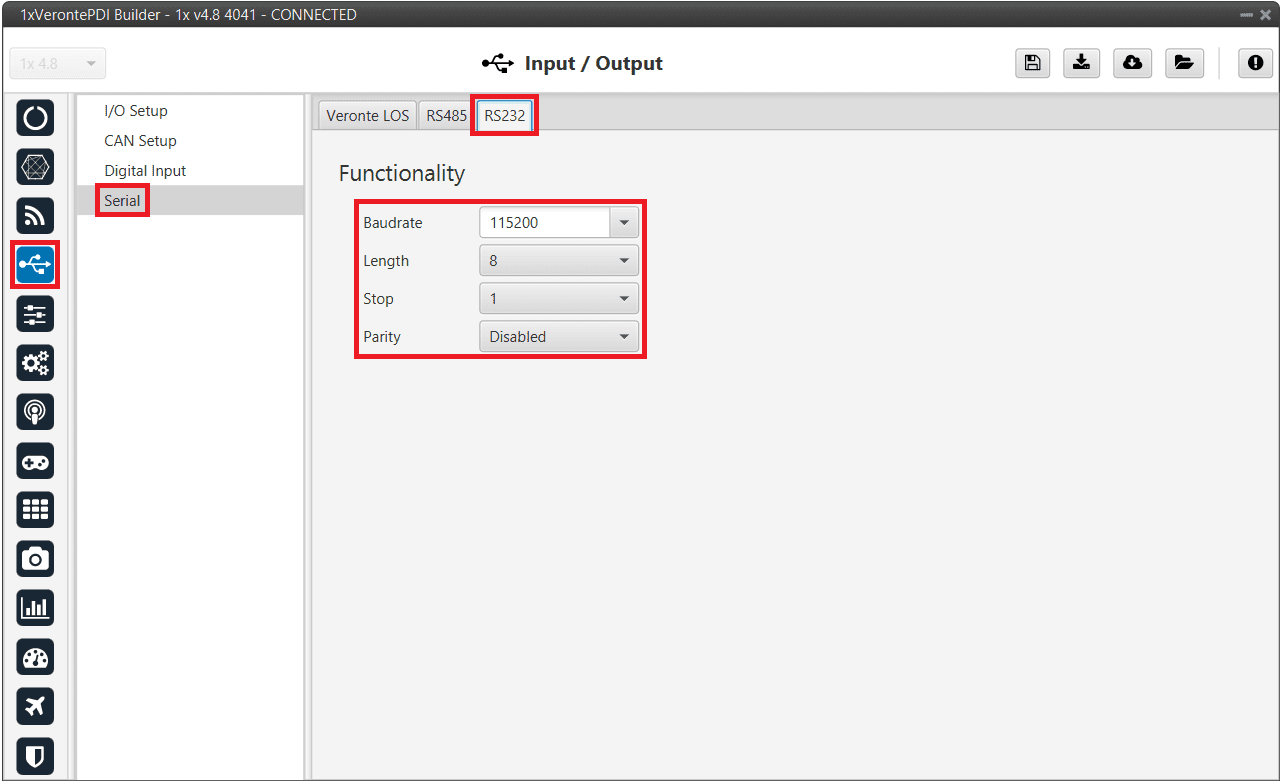
Vectornav VN-300 - RS232 port configuration¶
Go to Input/Output menu \(\rightarrow\) I/O Setup panel.
Connect the RS232 Producer to the Vectornav VN-300 Consumer:
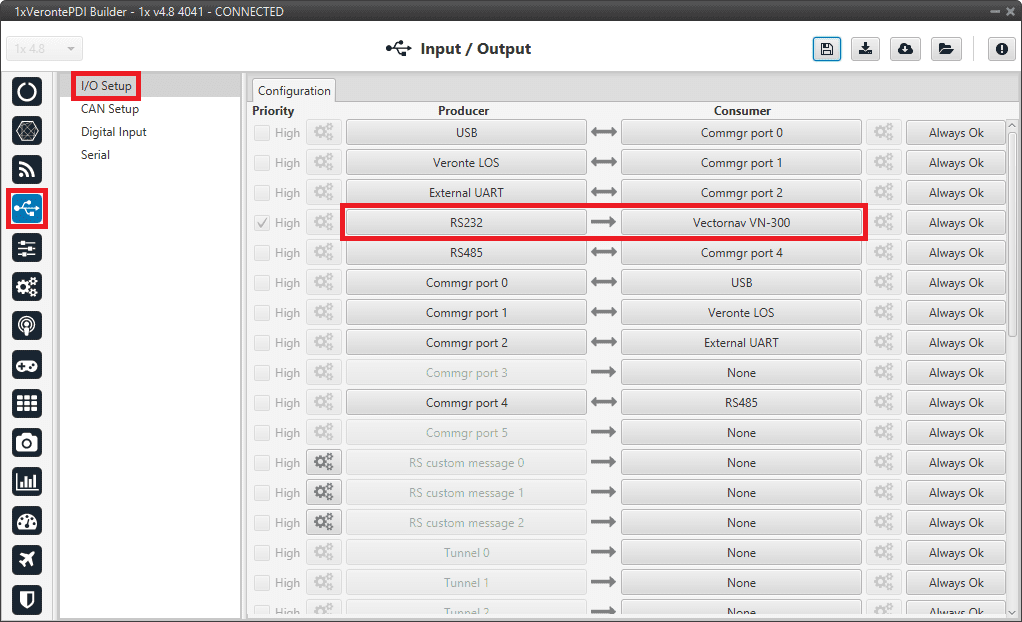
RS232 \(\rightarrow\) Vectornav VN-300¶
Go to Block Programs menu.
Create a program to configure the Vectornav VN-300 as the type of navigation.
Usually the user has a Navigation program where the blocks that are related to the navegation are implemented.
Configure the Navigation block selecting Vectornav VN-300.
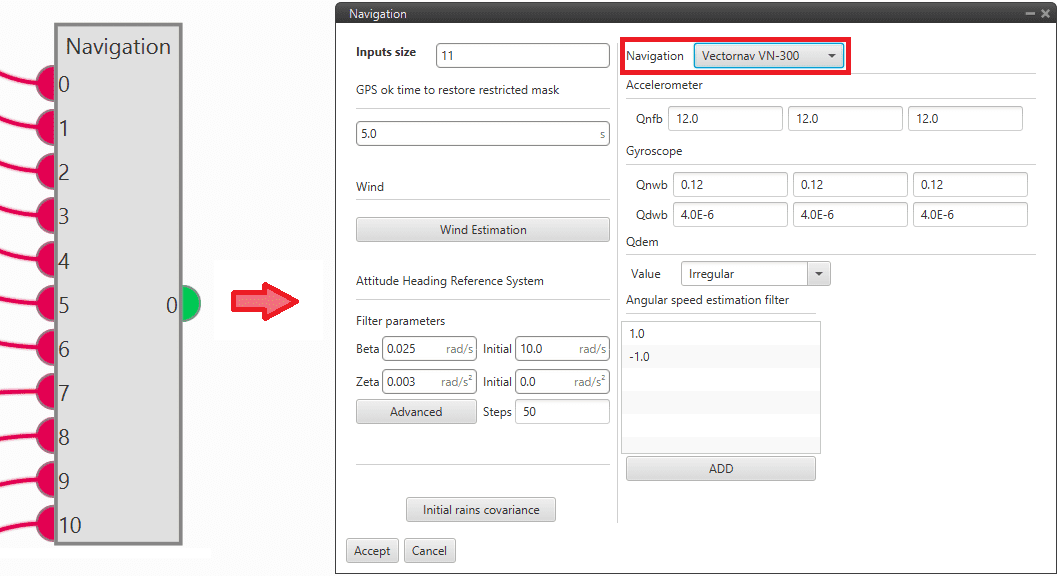
Vectornav VN-300 - Navigation sensor block configuration¶
For more information on this block, see Navigation blocks of Block Programs section.